
注目研究
注目研究
国立高専の注目研究を、ライフサイエンス、環境・エネルギー、製造技術、材料・装置デバイス、機械、建築・土木、情報・通信、計測・分析、自然・科学、人文・社会の10の分野に分けて紹介します。
研究ネットワークについて:日本全国に設置された51の国立高専に所属する研究者がネットワークを形成して、さまざまな分野で新産業につながる研究開発を行っています。全国各地で研究している研究者が連携することで、難解な技術問題に対して複合融合的なアプローチを行い、答えを見いだします。
GEAR5.0(研究成果の社会実装を通じた技術者教育の高度化)について:こちらをご覧ください。
高専発!「Society 5.0型未来技術人財」育成事業(GEAR 5.0/COMPASS 5.0):こちらをご覧ください。
事例紹介
研究分野
機械
分類
タイトル
車椅子型自律移動ロボット高尾シリーズの開発
氏名
多羅尾 進
学校名
東京工業高等専門学校
所属学科等
機械工学科
職名
教授
プロフィール写真

概要
日常の生活環境に柔軟に適応できる移動機能を備えた自立・自律移動ロボットの開発に取り組んでいます。最近では、これまでに培ってきた自律移動ロボットの基本機能を継承しながらこれに加えて、福祉介護機器への応用に向け、人が搭乗できるコンセプトを踏まえた自律走行ロボット「高尾4号」の開発を進めています。
本文
<自律移動ロボットの機体の開発>
バリアフリー化が進む屋内外での走行を考え、ロボット機体の主寸法は、電動車椅子のJIS規格(JIS T9203:2013)に沿うように設計を行っています。移動機構のユニットは一般的な電動車椅子にも使用されており、小回りの効く左右独立駆動型移動機構で構成され、ロボット「高尾4号」本体の質量は全体で60[kg]、搭乗者の体重は80[kg]まで想定しています。 これまでに開発してきた「高尾2号」および「高尾4号」の移動機構のユニットの特徴を図1に示します。「高尾4号」では、サスペンション機構の単純化を図っています。

図1 高尾シリーズの移動機構ユニット
<自律移動ロボットのシステム開発>
自律移動用ソフトウェア開発の効率化を狙い、基本的にはROS(Robot Operating System)上でシステムの構築を進めています。周囲の幾何学的情報を取得するため測域センサLRF(Laser Range Finder) を複数台用いています。これに関連して360°全周囲を見渡す全方位測域システム、および、(2次元スキャンを行う)LRFを上下に揺動させ3次元スキャンする3次元測域システムについて、図2に示します。「高尾4号」では、モンテカルロ位置推定によってロボットの自己位置推定の頑強性を高めることが試みられています。
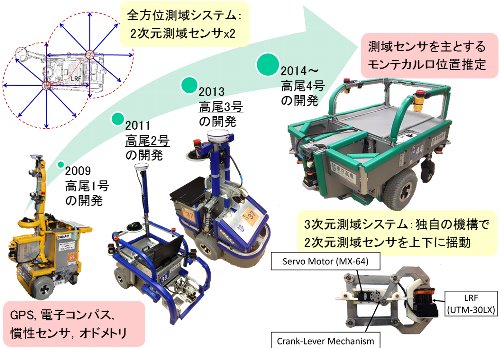
図2 開発の変遷と制御システムの特徴
<今後の展開>
2009年度から開発をスタートした高尾シリーズは、試作4号機に至っています。条件の良い環境では、安定した自律走行が可能となっていますが、車体が上下に激しく揺れる悪路での走行などの対処はこれからです。つくばチャレンジなどを活用した実証実験の経験を積みながら、安全にかつ安定して走行できるよう完成度を高めていきます。
バリアフリー化が進む屋内外での走行を考え、ロボット機体の主寸法は、電動車椅子のJIS規格(JIS T9203:2013)に沿うように設計を行っています。移動機構のユニットは一般的な電動車椅子にも使用されており、小回りの効く左右独立駆動型移動機構で構成され、ロボット「高尾4号」本体の質量は全体で60[kg]、搭乗者の体重は80[kg]まで想定しています。 これまでに開発してきた「高尾2号」および「高尾4号」の移動機構のユニットの特徴を図1に示します。「高尾4号」では、サスペンション機構の単純化を図っています。
図1 高尾シリーズの移動機構ユニット
<自律移動ロボットのシステム開発>
自律移動用ソフトウェア開発の効率化を狙い、基本的にはROS(Robot Operating System)上でシステムの構築を進めています。周囲の幾何学的情報を取得するため測域センサLRF(Laser Range Finder) を複数台用いています。これに関連して360°全周囲を見渡す全方位測域システム、および、(2次元スキャンを行う)LRFを上下に揺動させ3次元スキャンする3次元測域システムについて、図2に示します。「高尾4号」では、モンテカルロ位置推定によってロボットの自己位置推定の頑強性を高めることが試みられています。
図2 開発の変遷と制御システムの特徴
<今後の展開>
2009年度から開発をスタートした高尾シリーズは、試作4号機に至っています。条件の良い環境では、安定した自律走行が可能となっていますが、車体が上下に激しく揺れる悪路での走行などの対処はこれからです。つくばチャレンジなどを活用した実証実験の経験を積みながら、安全にかつ安定して走行できるよう完成度を高めていきます。
その他特記事項
電話
042-668-5196
E-Mail
tarao*tokyo-ct.ac.jp
ホームページ
http://www.tokyo-ct.ac.jp/index.html
掲載年度
2015年度